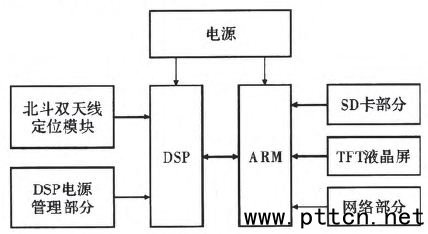
主页(http://www.pttcn.net):一种基于双天线的北斗定位系统设计与实现(2) 2 系统硬件设计 系统使用DSP+ARM双芯片结构,DSP主要负责接收北斗模块的定位信息和算法处理功能,ARM芯片负责与DSP芯片通信、控制TFT液晶屏的显示功能。硬件设计主要包括电源部分、ARM部分、DSP部分、网络部分、TFT液晶屏部分以及北斗模块多部分的设计。 2.1 系统硬件结构框图
2.2 电源部分 系统使用较为常见的12 V电压作为总的电源输入,经LM2596芯片得到5 V电压作为DSP模块和TFT液晶屏的电源,5 V电压经ASM1117得到3.3 V电压作为ARM模块和网络部分以及TF卡的电源。 2.3 ARM部分设计 ARM芯片使用意法半导体公司的STM32F103VET6芯片,该芯片为32位Cortex—M3内核微处理器,主频最高可达72 MHz,封装为LQFP100,减小了PCB板的面积。另外,还支持IO管脚的重映射配置,降低了PCB布线的难度,且支持JTAG、SWD两种调试/下载模式,方便用户使用市面上较为常见的调试工具J-LINK调试/下载程序,因此使用方便。 2.4 DSP部分说明 DSP部分使用的芯片为TI公司的新型数字信号处理器TMS320F28335,该款芯片最高主频达150 MHz,采用哈佛流水线结构,并具有片内硬件乘法器,完成一次浮点数的乘加运算只需10个机器周期,故可进行高速数据运算。 2.5 网络部分说明 网络部分主要提供了一个可选功能,当条件满足时可将系统的定位信息发送到以太网上,供远端的用户访问、查询。 系统使用美国微星公司的ENC28J60网络芯片,该芯片为IEEE802.3兼容的以太网控制器,支持全/半双工模式,工作电压兼容TTL电平和CMOS电平,可编程会在发生冲突时自动重发,可编程填充和CRC生成,用于快速发送数据的内部FIFO、DMA以及硬件支持的IP校验和计算。其封装为SSOP28,与微处理器的链接方式为SPI总线,因此控制方便,最高速度可达10 Mbit·s-1。 2.6 TFT液晶屏部分说明 TFT液晶屏的每个像点均是由集成在像素点后面的薄膜晶体管来驱动的,从而可做到高速度、高亮度、高对比度显示屏幕信息,是目前最佳的LCD彩色显示设备之一,其效果接近CRT显示器,是现在笔记本电脑和台式机上的主流显示设备。 系统使用16 bit真彩色,320×240分辨率TFT液晶屏。STM32F103ARM芯片负责TFT液晶屏的驱动,STM32F103ARM芯片与TFT液晶屏之间使用FSMC总线通信,以完成对该液晶屏的初始化和显示控制。 2.7 北斗模块部分说明 北斗模块部分使用北京和芯星通公司的UM220北斗定位芯片,其可同时支持BD2 B1、GPS L1两个频点,输出数据方式为USART,数据协议为NMEA 0183,默认通信波特率为9 600 bit·s-1,并可根据用户需要自行设定最高支持波特率为230 400 bit·s-1,其输入/输出信号类型均为LVTTL电平。
UM220通过串口与DSP连接,DSP通过串口完成对北斗模块的配置,并接收其定位信息。
|